
Image-guided robotic system and method with step-wise needle insertion
Published in WIPO, 2023
Inventors
Yue Chen , Mishek Musa, Xiaofeng Yang, Nima Kokabi, Anthony Gunderman
Abstract
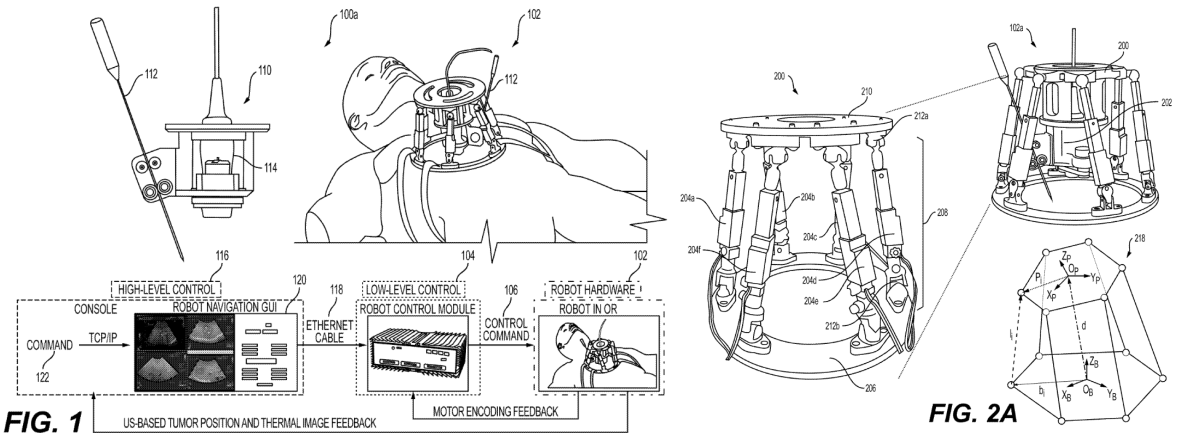
An exemplary robotic needle insertion system is disclosed that can provide respiration compensated needle insertion for an accurate and efficient ablation, biopsy, draining placement of a needle, among other surgical procedures. The system employs a robotic instrument comprising (i) a needle insertion mechanism configured to deliver the needle insertion in a step-wise manner that mimics the current clinical practice by inserting the needle (e.g., RFA needle) according to respiration and other motion and (ii) a probe manipulation mechanism to direct an ultrasound probe to provide intraoperative image guidance for the needle insertion. The robotic instrument includes a multi-degrees of freedom (DoF) motion control and actuator to provide for the accurate targeting of the needle at any workspace location.
Recommended citation: Chen, Y., Musa, M., Yang, X., Kokabi, N., & Gunderman, A., "Image-guided robotic system and method with step-wise needle insertion"
Download Paper